






























 1841
1841
 0
0

具身智能领域,一场静水流深的变革正在中国年轻一代工程师手中悄然开启。
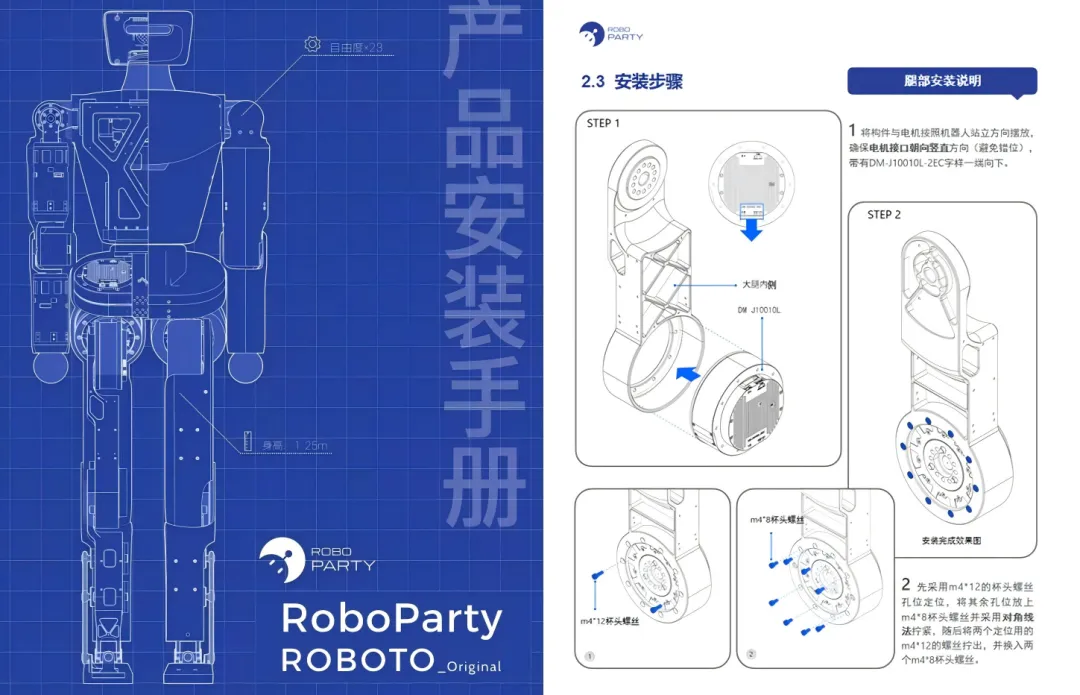
近日,“萝博派对”(RoboParty)在嘉立创旗下立创开源硬件平台上,正式宣布将其自主研发的双足人形机器人“萝博头原型机”(Roboto_Origin)进行全栈开源。
不同于以往行业内“只发论文不发代码”或“只开软件不谈硬件”的半遮半掩,这群年轻的极客选择了最彻底的“摊牌”:从核心运控算法到每一张机械图纸,从电路原理到每一颗螺丝的拧紧力矩,甚至连研发路上的“避坑指南”都毫无保留地公之于众。
这不仅是一个技术开源的案例,更是中国极致供应链与新生代创新力量深度“咬合”的缩影。它标志着人形机器人正在从少数实验室的“奢侈品”,加速转化为普惠大众的“工业积木”。
在测试场地内,身高1.2米、重30公斤的“萝博头”正在以3米/秒的速度飞奔。这个速度意味着它已跻身全球全开源人形机器人的第一性能梯队。
长期以来,人形机器人行业被视为“黑箱”林立的竞技场。高昂的试错成本、非标化的底层硬件、封闭的运控算法,让无数开发者望而却步。大量高校和初创团队将宝贵的精力消耗在“重复造轮子”的基础搭建上,而非核心智能的突破。
“人形机器人要实现最终的“可用性”,需要集结全行业的开发者,让机器人像人一样在各种场景中学习和进化。开源,就是通往那个终极秩序的最快路径。”萝博派对创始人黄一道出了此次开源的本质。
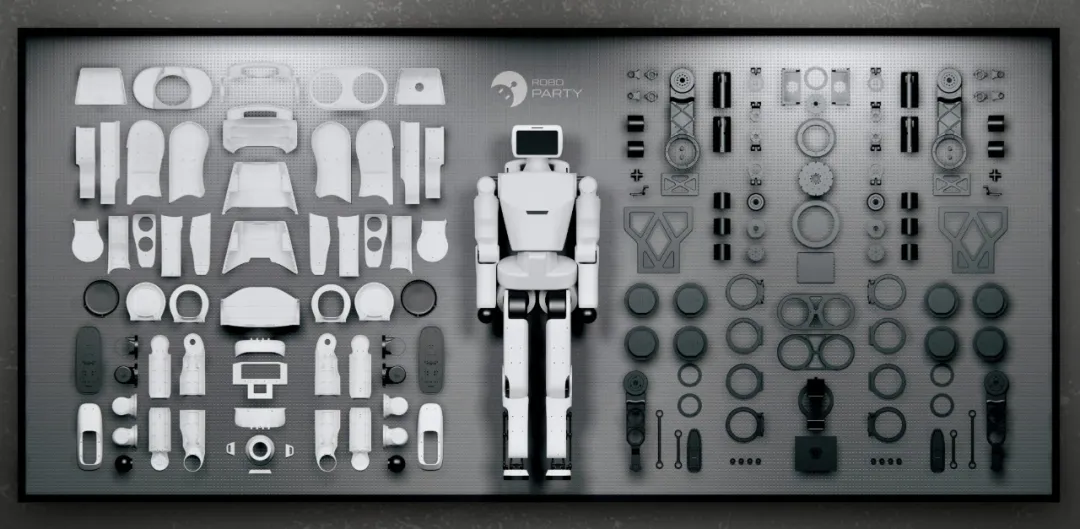
这支核心成员来自哈尔滨工业大学的年轻团队,做了一件极具“反商业直觉”的事。他们不仅上传了通常被视为商业机密的BOM(物料清单)和PCB文件,更发布了一份详尽的Know-how知识库。
线束如何走才不会在运动中磨损?电机过热保护的阈值设在多少最安全?Sim2Real(从仿真到真机)过程中数据如何对齐?这些通常需要工程师耗费数月甚至数年“踩坑”才能获得的隐性知识,如今被整理成标准化的文档,供全球开发者免费查阅。
另外,团队推行“去定制化”,不绑定特定零部件。这意味着,开发者可以利用市面上的标准件,配合开源的SOP(标准作业程序),像搭积木一样组装出高性能机器人。在具备一定批量生产的前提下,整机成本有望被压缩至3.5万元以内,打破了行业的成本线。
“4个月,从概念设计到样机实现3m/s稳定奔跑。”
一台人形机器人的诞生,涉及数百个电子元器件、数十块精密电路板以及高强度的机械结构件。在传统的制造业语境下,研发团队需要分别对接PCB厂、贴片厂、机加工厂,光是沟通磨合与物流流转,往往就要耗费数月。
但在“萝博头”的研发故事里,物理世界的制造流程被高度数字化了。
晚上改完一版设计图纸,一两天就可以收到样件。团队硬件工程师回忆道,嘉立创“设计即生产”的响应,让他们敢于放开手脚、验证多种大胆的电路、结构方案。
不仅是电子系统,在机械结构上,嘉立创的“电子+机械”一站式服务展现了敏捷的协同力。机器人关节连接件需要极高的强度与精度,CNC精密加工服务确保了微米级的咬合公差;而复杂的曲面外壳设计,则通过工业级3D打印迅速成型。
从高多层PCB的极速打样,到航空铝材CNC的即时交付,原本离散、冗长的制造环节,被整合成了一条流畅、可视化的数字流水线。这种极致的供应链效率,支撑着这群年轻人完成了高频次的硬件迭代“冲刺”。
当前的行业现状是,虽然百花齐放,但技术碎片化严重,缺乏统一的设计规范和接口标准。不少企业都在试图从螺丝钉做起,构建自己的高墙小院。
萝博派对的选择,是试图成为那个打破围墙的“安卓”。
通过全栈开源,他们希望构建一套可复现、可验证、可迭代的通用底层平台(Infrastructure)。这是一种基础设施化的思维——将机器人开发所需的关键链路沉淀为行业共享资源。

在软件与控制层面,项目开放了底层控制全量代码,涵盖模仿运动、感知运动与导航运动三大核心模块。特别是其基于数据驱动范式的AMP(对抗运动先验)运控算法,支持SMPL-X人体模型适配,让机器人能够像人类一样通过学习海量动捕数据来掌握平衡。开发者无需从零搭建复杂的数学模型,即可直接复用这些成果,进行二次开发。
“把所有技术都开放,看似冒险,但它能换来整个开发者社区的力量,这个力量是任何一家封闭的公司都无法比拟的。”正如创始人黄一所言,当成千上万个开发者站在同一个开源基石上起跑,人形机器人的进化速度将被指数级放大。
*资源地址:
1、Roboto全开源人形机器人:
https://oshwhub.com/roboparty-roboto/roboto-fully-open-source-humanoid-robot
2、“动手学人形机器人问题清单”Know-how文档:
roboparty.com/roboto_origin/doc
(全行业共建的落地知识库,支持开发者参与提交)
